












(design of pi and fuzzy controllers for dynamic voltage restorer (DVR
طراحی از PI و Fuzzy برای کنترل بازگرداننده دینامیکی ولتاژ (DVR)
نام مقاله به فارسی:
نام مقاله به انگلیسی:
طراحی از PI و Fuzzy برای کنترل بازگرداننده دینامیکی ولتاژ (DVR)
طراحی از PI و Fuzzy برای کنترل بازگرداننده دینامیکی ولتاژ (DVR)
در این مقاله به شبیهسازی و مقایسه الگوریتم کنترل PI و کنترل فازی میپردازیم. ابتدا مدل سیستم را به صورت شکل (۱) در نظر میگیریم. در این سیستم منبع ۲۲kv میباشد، توسط ترانس این ولتاژ به ۴۱۵v کاهش مییابد که این ولتاژ بار است. در این سیستم دو بار در نظر گرفته شده، یکی بار غیرحساس و بار حساس. یک فیلتر در خروجی اینورتر برای فیلتر کردن هارمونیکهای مرتبه بالا در نظر گرفته شده است.
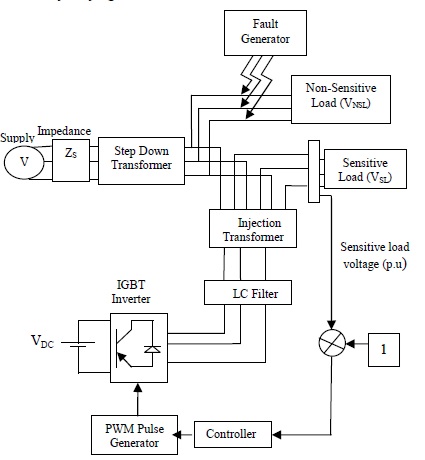
شکل( ۱ ): نمودار بلوکی سیستم DVR
در ادامه ابتدا به بررسی و شبیه سازی کنترل کننده تناسبی انتگرالی PI میپردازیم، سپس کنترلکننده فازی PI برای سیستم طراحی و شبیه سازی میشود. شبیه سازیها بر اساس میزان افت ولتاژ، تاثیر تغییر در ولتاژ DC ورودی و rating ترانس تزریق بررسی میشود.
کنترل تناسبی انتگرالی PI
به طور کلی هدف از طراحی کنترلکننده برای سیستم DVR تنظیم ولتاژ بارهای حساس در مقدار ثابت میباشد. برای اینکه همواره ولتاژ بار در مقدار ثابت و مطلوب قرار گیرد، باید ابتدا این کمیت اندازهگیری شده و با مقدار مطلوب آن مقایسه شود، در نتیجه با وجود خطای بین مقدار مطلوب و واقعی ولتاژ بار، کنترلکننده ولتاژ بار را برای رسیدن به مقدار مطلوب تنظیم میکند.
برای این کار ابتدا ولتاژ سه فازی بار از چارچوب abc به چارچوب dqo با استفاده از تبدیل پارک منتقل میشود. در شرایط تعادل و مطلوب ولتاژ بار، ولتاژ در محور d برحسب pu برابر با ۱ و در محور q برابر با صفر است. ولی این مقادیر مطلوب با وجود خطا و اغتشاش تغییر کرده و در نتیجه با اندازهگیری و مقایسه این مقادیر میتوان وجود شرایط غیرعادی در بار را تشخیص و با استفاده از کنترلکننده آن را اصلاح کرد. نمودار بلوکی این سیستم به صورت شکل (۲) میباشد

شکل (۲): نمودار بلوکی سیستم کنترل DVR با استفاده از تبدیل پارک
در شکل(۲) ولتاژ بار حساس بر حسب pu میباشد. با توجه به این شکل میتوان اینگونه بیان کرد که ابتدا ولتاژ بار حساس از چارچوب abc به چارچوب dqo با استفاده از تبدیل پارک منتقل میشوند. سپس این مقادیر با مقادیر مطلوب برای ولتاژ بار مقایسه شده در نتیجه در هر لحظه یک خطای ردیابی ایجاد میشود. این خطا به کنترل کننده داده شده و براساس میزان خطا کنترلکننده سیگنال اصلاح را برای بازیابی ولتاژ بار ایجاد میکند.
فرض میکنیم که دوبار در سیستم موجود است، یک بار که توانایی تحمل افت ولتاژ را داشته و دربرابر تغییرات ولتاژ مقاوم است و بار دوم که یار حساس میباشد، هدف طراحی کنترلکنندهای است که توانایی نگه داشتن ولتاژ بار حساس در مقدار ۱pu را داشته باشد. از دو کنترلکننده PI در سیستم برای اینکار استفاده میکنیم که یکی برای تنظیم مقدار ولتاژ محورd و دیگری برای محور q میباشد.
ابتدا فرض میکنیم، افت ولتاژ ۸۰% در بازه زمانی ۰٫۲ تا ۰٫۸ ثانیه به صورت زیر در ولتاژ بار رخ داده است. در این حالت ولتاژ منبع به صورت شکل (۳) میباشد
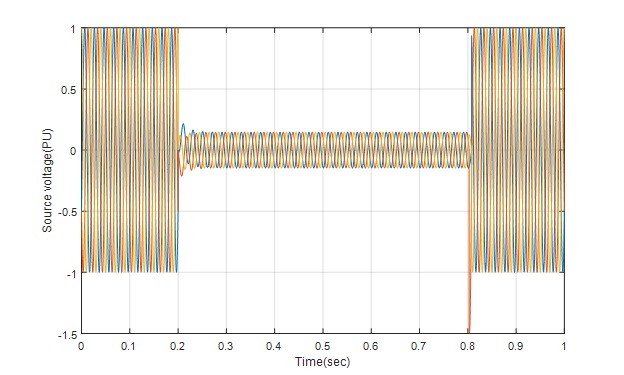
شکل (۳) ولتاژ منبع با ۸۰% افت ولتاژ
با استفاده از دو کنترلکننده PI برای این سیستم، نتایج شبیه سازی در شکل (۴) و (۵) نمایش داده شده است.
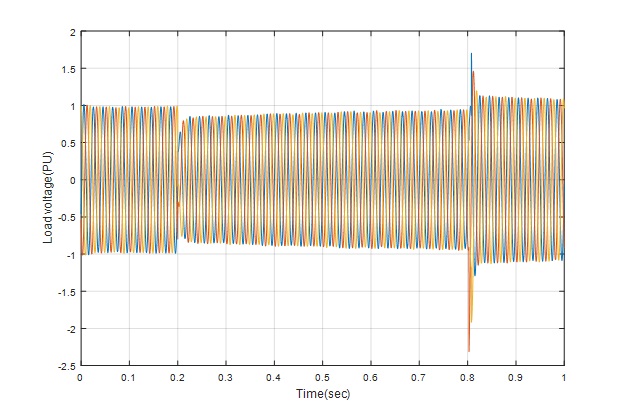
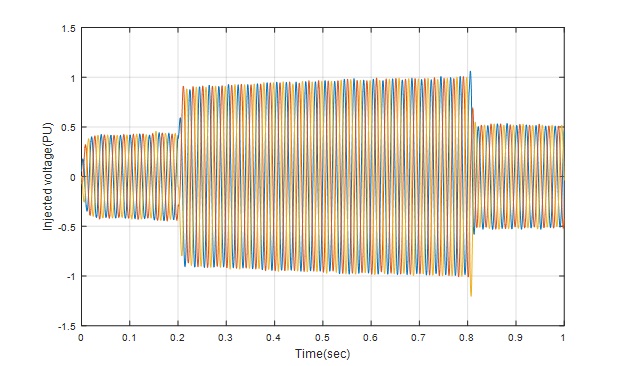
شکل (۴) ولتاژ تزریقی و ولتاژ بار
در شکل (۴) ولتاژ تزریقی نشان داده شده که توسط اینورتر و یک فیلتر به سیستم تزریق میشود.
و همچنین خطای ردیابی ولتاژ مرجع در محور d,q به صورت زیر میباشد
و در نهایت THD ولتاژ بار حساس به صورت زیر بدست آمده است
کنترلکننده فازی تاکاگی سوگنو و کانگ TSK
سیستمهای فازی سوگنو یا TSK نوعی از سیستمهای فازی میباشد، که قسمت آنگاه هر قاعده فازی، یک عدد یا عبارت صریح میباشد. سیستمهای فازی TSK دارای غیرفازی ساز نبوده، , و خروجی آن به صورت میانگین وزندار قسمت آنگاه قواعد فازی میباشد.
در این مقاله برای شبیه سازی و مدل سازی سیستم فازی، از کنترلکننده فازی TSK با فازی ساز منفرد، موتور استنتاج ضرب به صورت زیر بدست میآید
| نوع مقاله | ELSEVIER |
| سال ارائه | ۲۰۱۲ |
| گزارش کار | دارد |
| شبیه سازی | در محیط MATLAB |




























دیدگاه ها