












ZIP
zip
مارس 1, 2018
429 kb
۲۰,۰۰۰ تومان
پروژه درس کنترل مدرن
پروژه درس کنترل مدرن
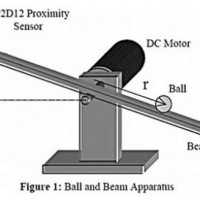
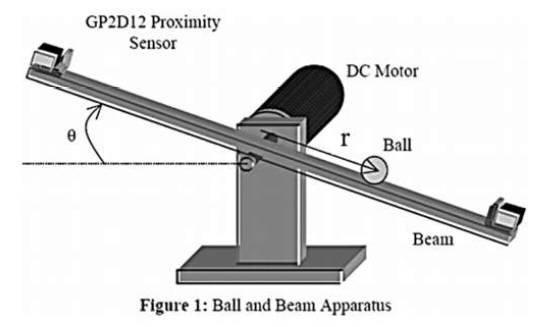
سیستم توپ و میله زیر را در نظر بگیرید، هدف کنترلی ذر این سیستم، قرار دادن توپ در هر مکانی روی میله با تغییر گشتاور موتور می باشد. برای رسیدن به این هدف، سیستم با گام های مختلف مدلسازی، شبیه سازی و کنترل مورد بررسی قرار می گیرد و در نهایت کنترل خواهد شد. در این بخش به مدلسازی سیستم می پردازیم. فرض کنید ورودی کنترلی گشتاور موتور و خروجی، موقعیت توپ بر روی میله باشد.
پروژه درس کنترل مدرن
| شبیه سازی | دارد |
| گزارش کار | دارد |
پروژه درس کنترل مدرن, اعمال پله واحد به سیستم ,ماتریس انتقال حالت, کنترل پذیری و رویت پذیری سیستم, طراحی کنترلر فیدبک حالت ,جایابی قطب و بهره سیستم ,طراحی کنترلر فیدبک حالت ,طراحی رویتگر حالت , جایابی قطب های رویتگر , تخمین با اعمال کنترلر, اثر نویز و اغتشاش بر سیستم, اثر نامعینی و قوام سیستم

























دیدگاه ها