













Optimal Control of Double Inverted Pendulum Using LQR Controller Sandeep
کنترل بهینه پاندول معکوس دوبل با استفاده از LQR کنترل سندیپ
نام مقاله به فارسی:
نام مقاله به انگلیسی:
کنترل بهینه پاندول معکوس دوبل با استفاده از LQR کنترل سندیپ
کنترل بهینه پاندول معکوس دوبل با استفاده از LQR کنترل سندیپ
چکیده:
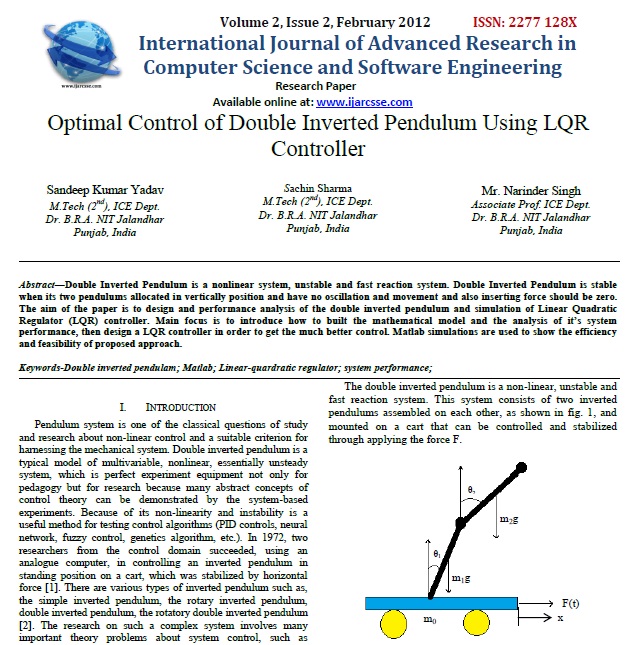
پاندول معکوس دوبل یک سیستم غیر خطی، ناپایدار و سیستمی واکنش سریع است. پاندول معکوس دوبل زمانی پایدار است که دو پاندول خود را در موقعیت عمودی اختصاص دهند و بدون هیچ نوسان و حرکتی و همچنین نیرو وارده باید صفر باشد. هدف از این مقاله طراحی و تجزیه و تحلیل عملکرد آونگ وارونه دوبل و شبیه سازی کنترل کننده خطی درجه دوم رگولاتور(LQR) است. تمرکز اصلی این مقاله بر معرفی چگونگی ساخت مدل ریاضی و تجزیه و تحلیل عملکرد سیستم و سپس طراحی یک کنترل کننده LQR به منظور رسیدن به کنترل بهتر می باشد. از شبیه ساز نرم افزار MATLAB برای نشان دادن کارایی و امکان سنجی روش پیشنهادی استفاده می شود.
مقدمه:
سیستم آونگ یکی از پرسش های کلاسیک به منظور مطالعه و پژوهش در مورد کنترل غیر خطی و یک معیار مناسب برای بهره برداری از سیستم مکانیکی است. دوبل پاندول معکوس یک مدل معمولی چند متغیره، غیر خطی و اساسا ناپایدار است که تجهیزات آزمایشی کامل نه تنها برای آموزش بلکه برای تحقیقات بسیاری از مفاهیم انتزاعی از تئوری کنترل را می توان با آزمایش مبتنی بر سیستم نشان داد. به علت غیر خطی بودن و بی ثباتی یک روش مفید برای تست الگوریتم های کنترل (کنترل PID، شبکه های عصبی، کنترل فازی، الگوریتم ژنتیک، و غیره) خواهد بود. در سال ۱۹۷۲، دو محقق در حوزه کنترل، موفق به ایجاد ثبات با استفاده از یک کامپیوتر آنالوگ، برای کنترل یک آونگ وارونه در حالت ایستاده در یک سبد، توسط نیروی افقی [۱] شدند.
انواع مختلفی از پاندول معکوس مانند، پاندول معکوس ساده، پاندول معکوس دوار، پاندول دوبل معکوس و پاندول چرخشی معکوس مضاعف وجود دارد [۲]. پژوهش در چنین سیستم پیچیده شامل بسیاری از مسائل مهم در مورد سیستم کنترل، مانند مسائل غیر خطی، نیرومندی، توانایی و مشکلات ردیابی خواهد بود.
| نوع مقاله | ژورنال ijarcsse |
| سال ارائه | ۲۰۱۲ |
| گزارش کار | دارد |
| ترجمه | دارد |
| پاورپوینت | دارد |
| شبیه سازی | در محیط MATLAB |
Optimal Control of Double Inverted Pendulum Using LQR Controller Sandeep کنترل بهینه پاندول معکوس دوبل با استفاده از LQR کنترل سندیپ شبیه سازی آماده مقاله کنترل مدرن ترجمه مقاله کنترل مدرن کنترل پاندول معکوس با منطق فازی شبیه سازی مقاله آونگ وارونه کنترل پذیزی و روئت پذیری آونگ معکوس کنترل LQR سیستم آونگ وارونه شبیه سازی کنترل فازی آونگ معکوس شبیه سازی Pendulum با matlab شبیه سازی کنترل مدرن با matlab خطی سازی سیستم غیرخطی ناپایدار شبیه سازی آونگ معکوس با کنترلر PID و LQR شبیه سازی آماده مقاله کنترل مدرن شبیه سازی کنترل مدرن با matlab شبیه سازی فیدبک حالت شبیه سازی رویت پذیری و کنترل پذیری شبیه سازی متلب LQR کنترل سندیپ



























دیدگاه ها