












Real-Time Controlling of Inverted Pendulum by Fuzzy Logic
زمان واقعی کنترل پاندول معکوس با منطق فازی
نام مقاله به فارسی:
نام مقاله به انگلیسی:
زمان واقعی کنترل پاندول معکوس با منطق فازی
زمان واقعی کنترل پاندول معکوس با منطق فازی
چکیده:
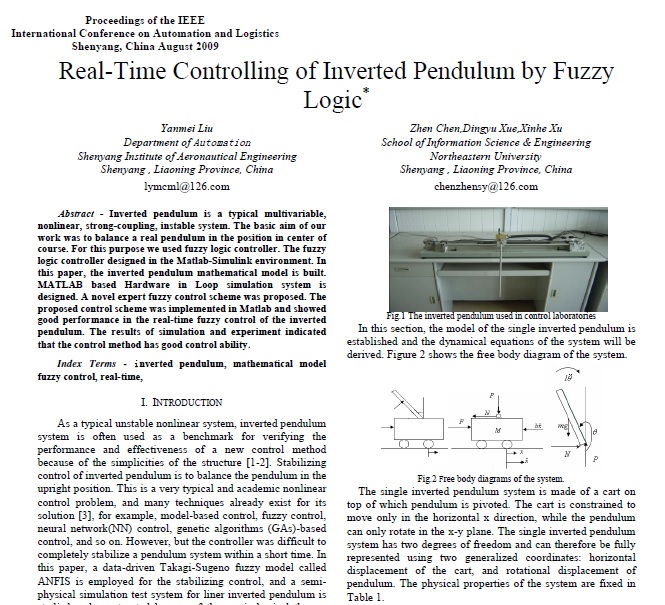
آونگ وارونه یک سیستم معمول چندمتغیرۀ غیرخطی ناپایدار با تزویج قوی است. هدف اصلی کار ما این بود که یک آونگ واقعی را در موقعیت مرکز حرکت متعادل نگه داریم. برای این منظور از کنترلکنندۀ منطق فازی استفاده کردیم. این کنترلکننده در محیط متلب-سیمولینک طراحی شد. در این مقاله، مدل ریاضی آونگ وارونه ایجاد دشه است. سیستم شبیهسازی سختافزار درحلقه بر اساس MATLAB طراحی شده است. یک طرح جدید کنترل فازی خبره پیشنهاد شده است. طرح کنترل پیشنهادی در متلب پیادهسازی شد که نشان دهندۀ عملکرد خوب درکنترل فازی زمان واقعی آونگ وارونه است. نتایج شبیهسازی و تجربی نشان میدهند که این روش کنترلی از توانایی بالایی برخوردار است.
عبارات شاخص- آونگ وارونه، مدل ریاضی، کنترل فازی، زمان واقعی.
مقدمه:
سیستم آونگ وارونه به عنوان یک سیستم معمول غیرخطی ناپایدار به دلیل سادهسازیهای ساختار آن اغلب به عنوان یک مبنا برای تایید عملکردو کارایی یک روش جدید کنترلی به کار میرود [۱-۲]. کنترل پایدارسازی آونگ وارونه عبارت است از متعادل کردن آونگ در موقعیت قائم. این یک مسالۀ کنترل غیرخطی بسیار معمول و آکادمیک است، و روشهای زیادی برای حل آن وجود دارد [۳]، برای مثال کنترل مدلمحور، کنترل فازی، کنترل شبکۀ عصبی (NN)، کنترل مبتنی بر الگوریتمهای ژنتیک (GA)، و غیره. با این حال، کنترلکننده به سختی میتواند یک سیستم آونگ را در یک مدت زمان کوتاه به طور کامل پایدار کند. در این مقاله، یک مدل فازی تاکاگی-سوگنوی مبتنی بر داده موسوم به ANFIS برای کنترل پایدارسازی به کار میرود، و یک سیستم تست شبیهسازی نیمهفیزیکی برای آونگ وارونۀ خطی بررسی شده و با استفاده از نظریۀ نیمهفیزیکی ایجاد میشود. فناوری طراحی سریع نمونه آزمایشگاهی شامل بکارگیری نرمافزار، توسعۀ سختافزار و طراحی و تحقق الگوریتم است که راهی برای کمک به توسعۀ سریع فراهم میکند [۴-۶].
| نوع مقاله | IEEE |
| سال ارائه | ۲۰۰۹ |
| گزارش کار | دارد |
| ترجمه | دارد |
| شبیه سازی | در محیط MATLAB |
Real-Time Controlling of Inverted Pendulum by Fuzzy Logic زمان واقعی کنترل پاندول معکوس با منطق فازی شبیه سازی آماده مقاله کنترل مدرن ترجمه مقاله کنترل مدرن کنترل پاندول معکوس با منطق فازی شبیه سازی مقاله آونگ وارونه کنترل پذیزی و روئت پذیری آونگ معکوس کنترل LQR سیستم آونگ وارونه شبیه سازی کنترل فازی آونگ معکوس شبیه سازی Pendulum با matlab شبیه سازی کنترل مدرن با matlab خطی سازی سیستم غیرخطی ناپایدار خطی سازی آونگ معکوس با کنترلر فیدبک حالت



























دیدگاه ها